Watts Amps Volts Calculator
Calculate Amps, Watts, Volts and kW, with single phase (1-phase) and three phase (3-phase) electrical calculations, AC and DC.


Instant watts amps calculations on the go.
Optimised for iPad, iPhone, Android Phones and Android Tablets.
[Supports 16 languages, light mode and dark mode]

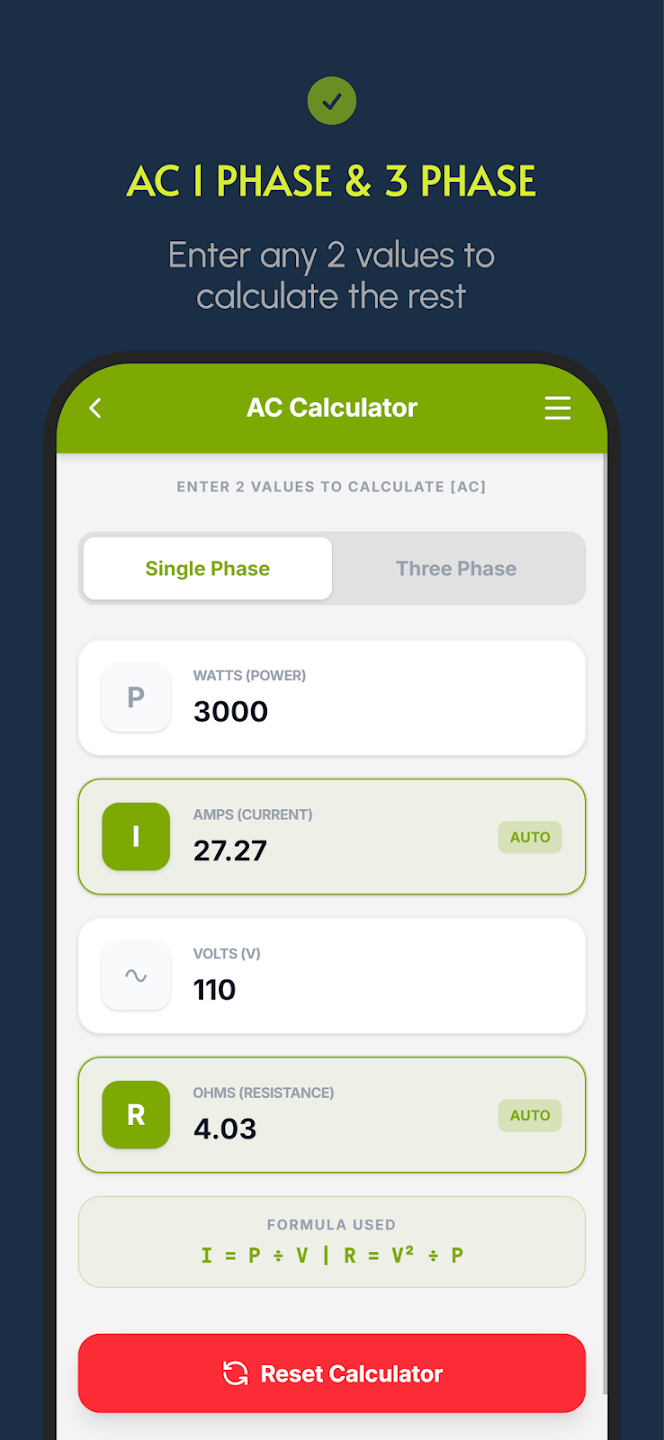
Single Phase Electrical Calculations
Enter any two values to calculate the third.
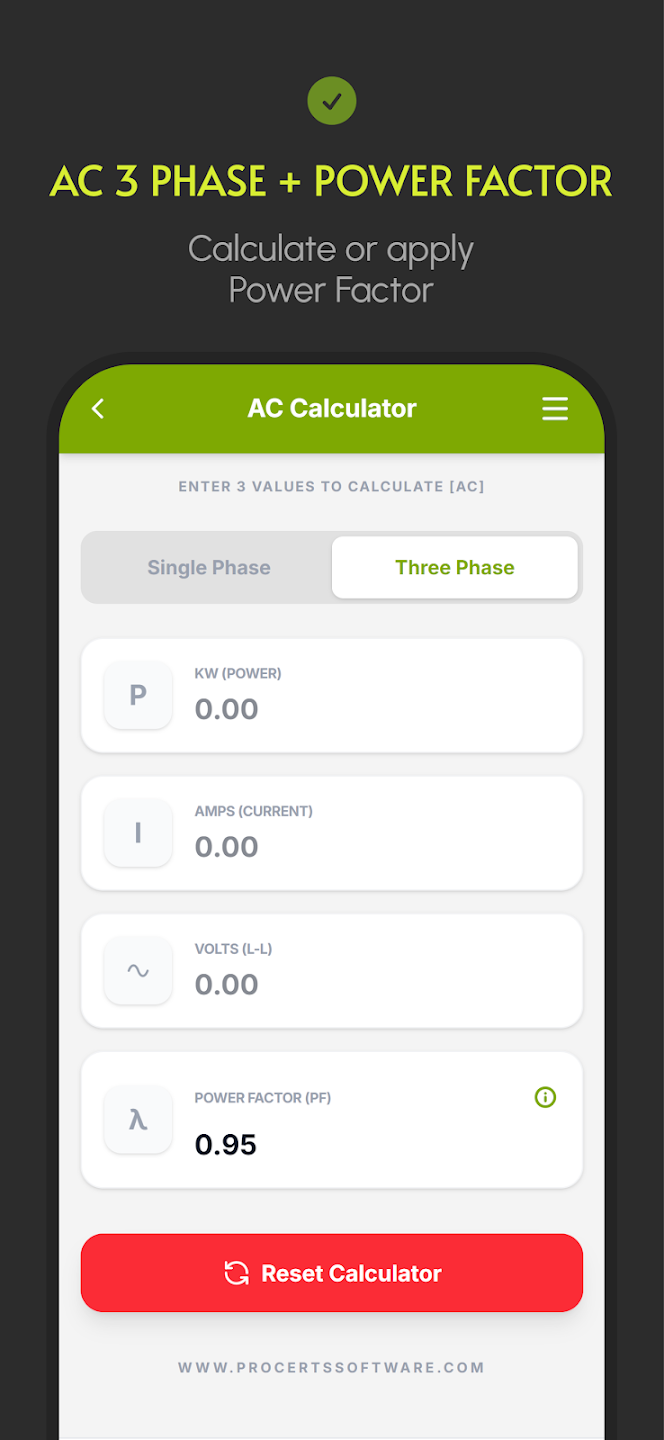
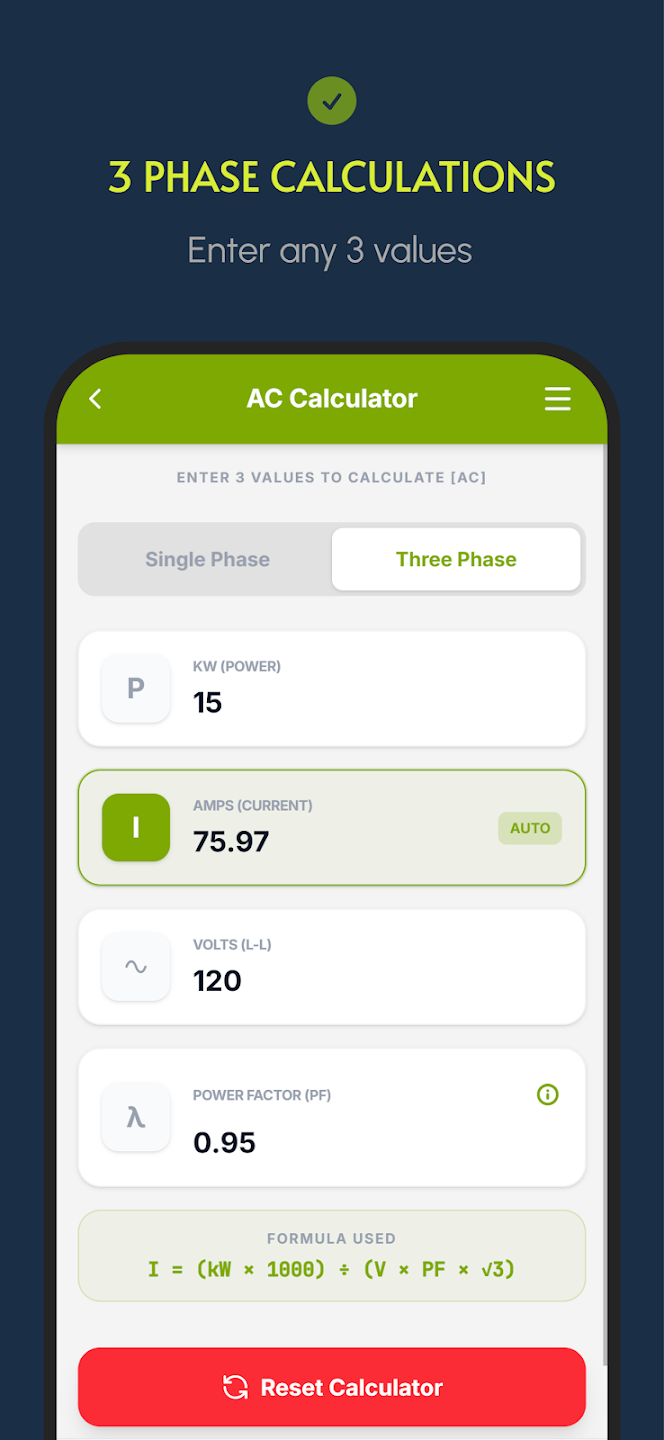
Three Phase Electrical Calculations
Enter any three values to calculate the forth.
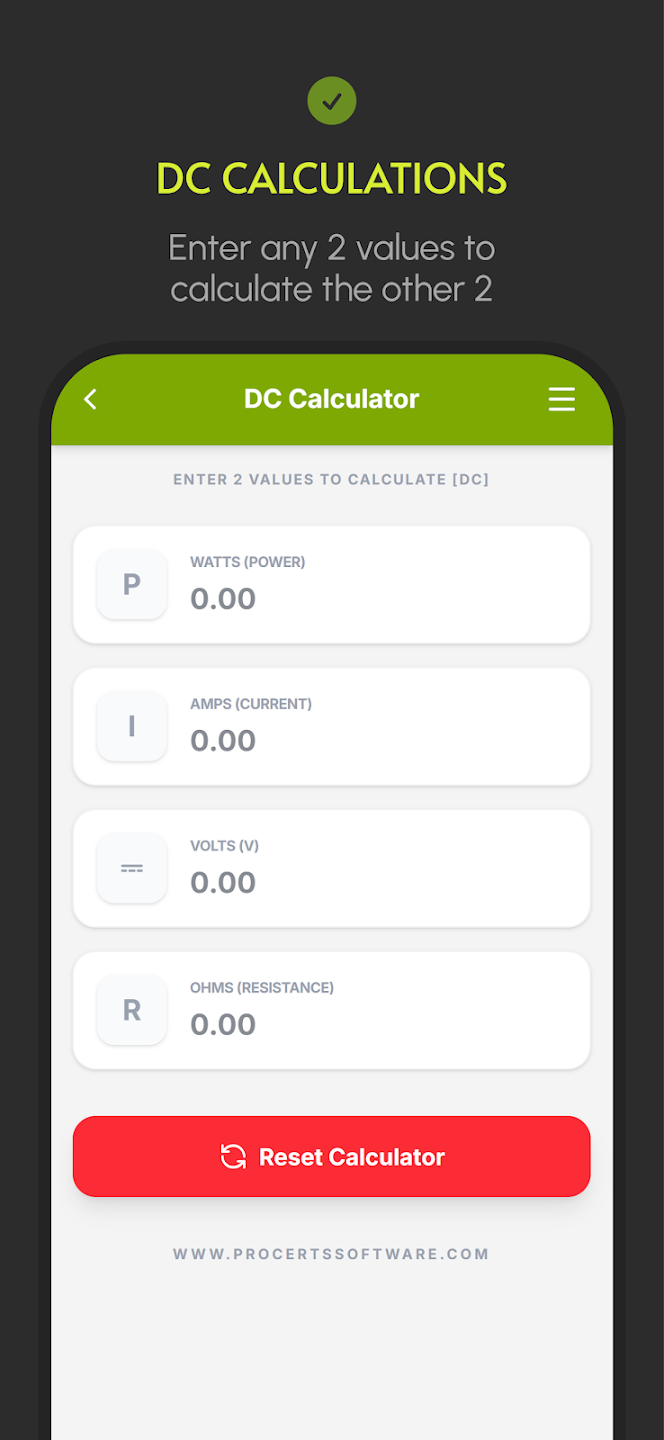
DC Calculations
DC calculations for Power (P), Current (I), Voltage (V) and Resistance (R).
What people think about this app…
Summary of Features
An electrical calculator for calculating AC and DC Watts, Amps, Volts, kW and Power Factor.
Get the App
Download the Watts Amps Volts Calculator App to start your electrical calculations today.